

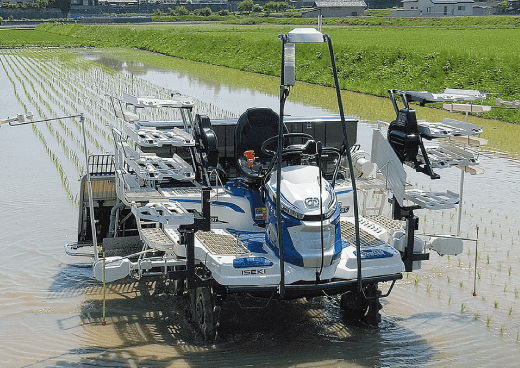
ラインナップ

PRJ8D-RLF

PRJ8D-RLFV

PRJ8D-RASLF4
| 型 式 | PRJ8DR |
|---|---|
| 条 数 | 8 |

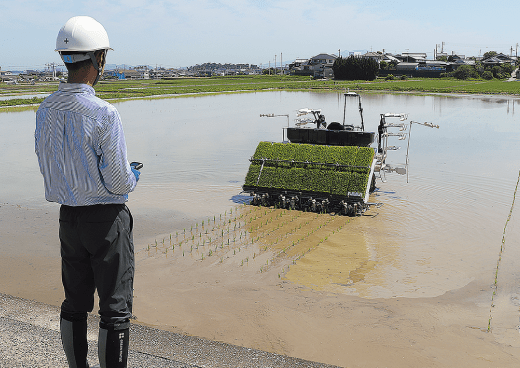
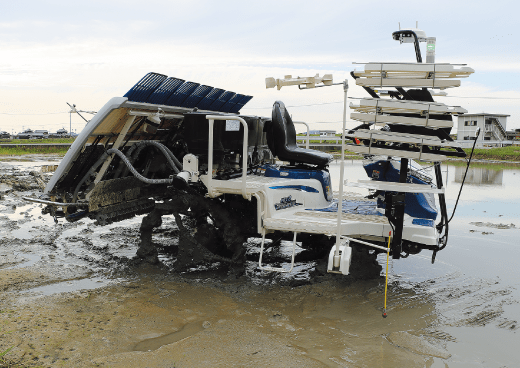
ロボット田植機のメリット
①軽労化
短い時期に集中する田植えの適期。
広大な面積の植付作業はオペレータに大きな負担を掛けます。
ロボット田植機なら疲労を軽減できます。
②人材(オペレータ)確保
ロボット田植機が熟練者並みの精度で作業を行うので、初心者でも作業ができ、担い手、プロ農家にとっての課題であるオペレータ不足を解消できます。
③規模拡大
疲労軽減とオペレータ不足を解消することで、さらなる経営規模拡大ができます。

国立研究開発法人農業・食品産業技術総合研究機構が保有する特許技術(特許第7019179号、特許第7100358号、特許第7445984号、特許第7466201号)を使用しています。
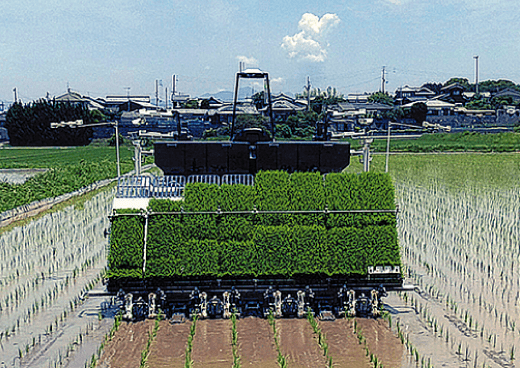
ロボット田植機の4ステップ
❶ ティーチング工程(ほ場形状の取得)
❷ 自動往復工程
❸ 自動内周工程
❹ 仕上げ工程
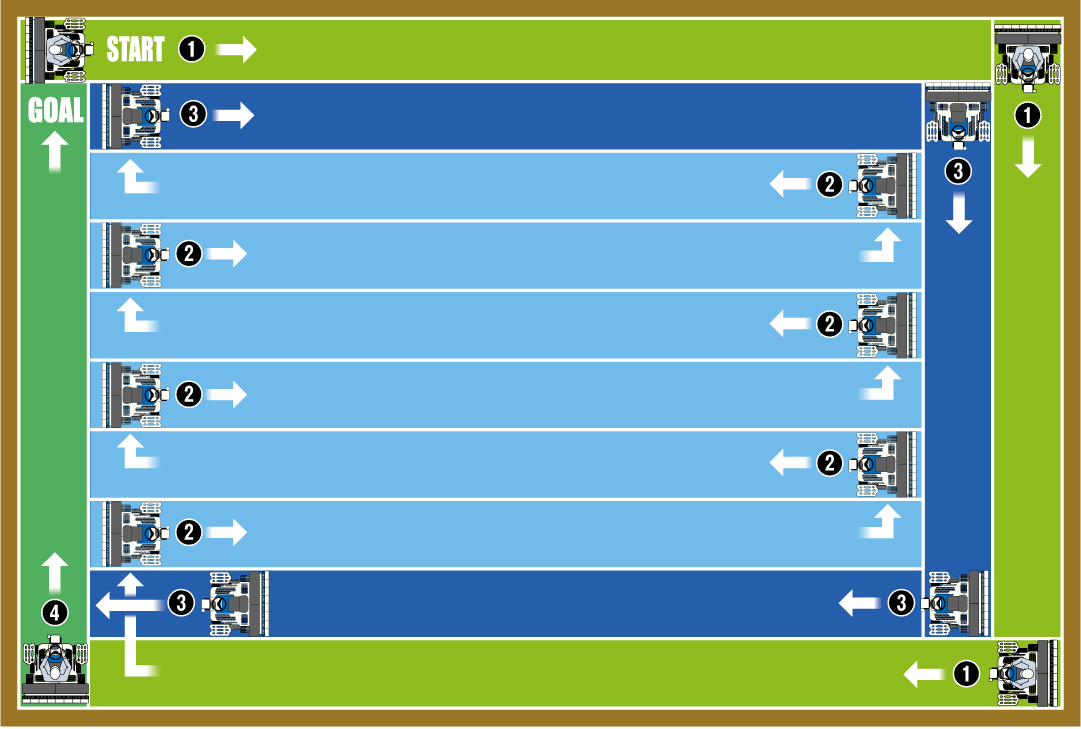
手動 ❶ ティーチング工程(ほ場形状の取得)
はじめに3辺を手動で植付けすることで、ほ場の形状を取得します(空走りは不要)。自動で作業経路を作成します。

作業と同時にほ場の形状を取得
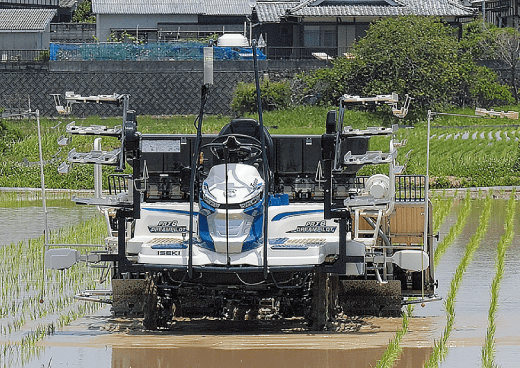
自動 ❷ 自動往復工程
ほ場の形状の取得後は、自動で往復植えをします。一往復ごとにあぜ近くで自動減速・停止します。
リモコンで往復植えスタート
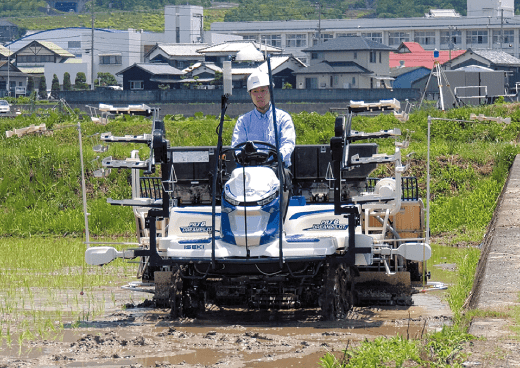
自動 ❸ 自動内周工程
内周を自動で植付けます。
往復植えが終わりに近付くと、あぜクラッチを制御して、内周植え8条となるよう自動調整します。
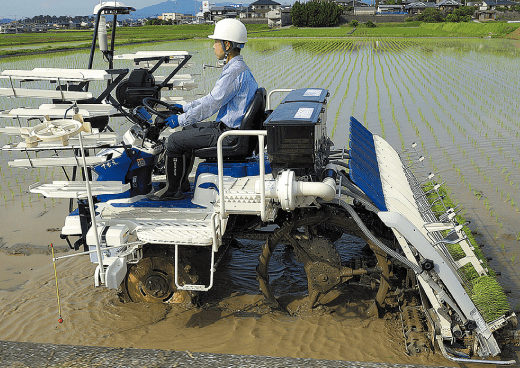
手動 ❹ 仕上げ工程
残った1辺を手動で植付けます。
リモコン

カラー液晶で分かりやすく表示し、300m先まで電波が届きます。
※ただし、周辺環境によっては300m以下でも通信できない場合があります。
オートデフロック

旋回時にタイヤの空転を感知すると、オートデフロック機構が働き、推進力を維持します。
強制4駆制御
さらに強力な推進力が必要になった場合には、自動で強制4駆が作動します。また、リモコンでも操作可能です。