

製品特性
| 型 式 | TJV755M1 | TJV755R3 | TJV985M1 | TJV985R3 |
|---|---|---|---|---|
| 馬力(PS) | 75PS | 75PS | 98PS | 98PS |

選べる作業モード
トラクタに搭乗せず、有人監視下で行うロボットモード
(有人監視型R3)
作業機・ほ場の隅4点を登録することで自動で最適な作業走行経路を成形します。リモコンとタブレットを持ってほ場・トラクタを監視できる位置からスタートボタンを押すことでほ場中央部分と外周の最内周を自動的に作業します。
トラクタに搭乗し、操作は自動で行うオートモード
(有人監視型R3)(有人搭乗型M1)
作業機・ほ場の隅4点を登録することで自動で最適な作業走行経路を成形します。搭乗した状態でスタートボタンを押すことでほ場中央部分と外周の最内周を自動的に作業します。
直進作業をアシストする自動操舵モード
(有人監視型R3)(有人搭乗型M1)
作業機・基準線を登録することで自動で最適な作業走行経路を成形します。スタートボタンを押すことで直進作業をアシストします。
仕組み・作業例
農林水産省により制定された「ロボット農機の自動走行に関する安全性確保ガイドライン」に準拠しています。
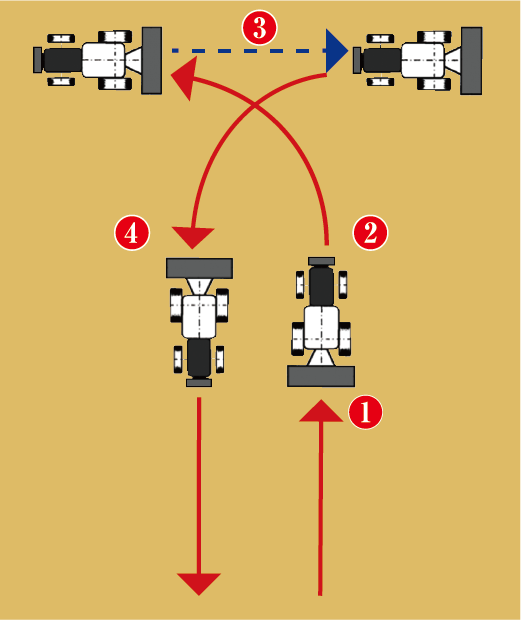
作業例
使用者がほ場内もしくはほ場周辺で監視している状況下において、有人監視型ロボットトラクタ1台による作業やオペレータが運転するトラクタと有人監視型ロボットトラクタによる2台の同時作業によって作業の省力化・生産性の向上を実現できます。
仕組み
RTK(リアルタイム・キネマティック)-GNSS測位方式VRS対応(N-Trip)を採用しています。IMU+RTK-GNSSアンテナでトラクタの現在位置を検出し、本機の傾きによる測位誤差に対して補正を行います。2周波仕様の衛生補正情報を利用し、有人監視及び有人搭乗下での高精度な自動走行作業を実現します。
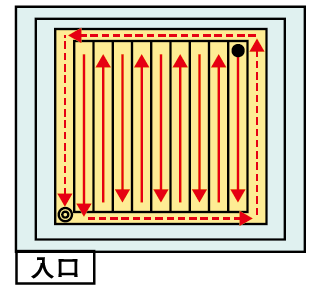
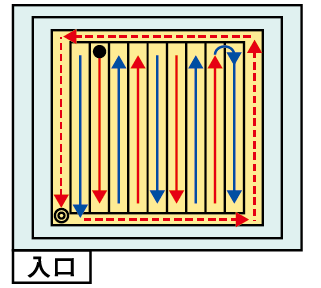
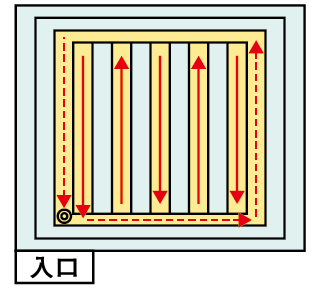
選べる走行パターン
使用に適するほ場の形状
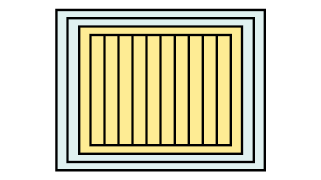
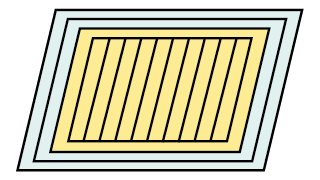
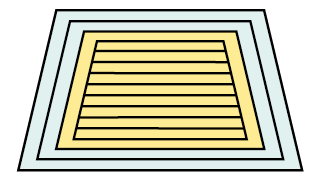
3つの走行パターン(2020年3月現在)

選べる旋回パターン
①一点旋回
効率重視のスピード旋回
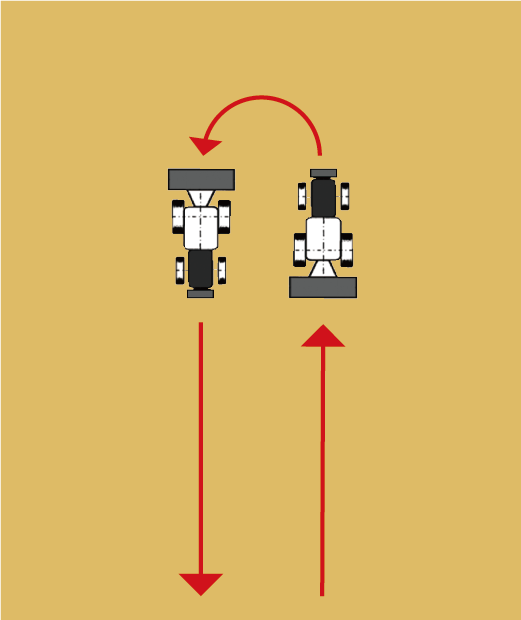
②切り返し旋回
ほ場が荒れるのを抑える旋回
※ほ場条件により旋回の向きが変わります。
機能・装備

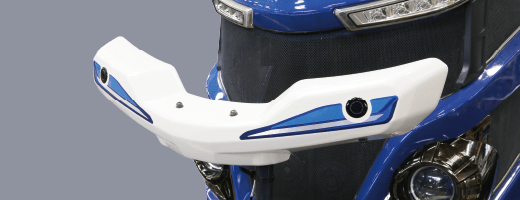
①超音波センサ
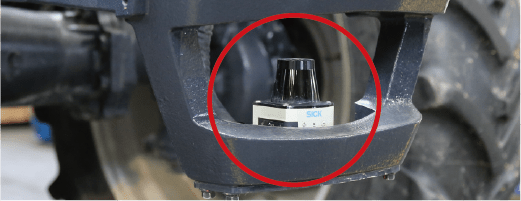
②赤外線レーザセンサ
超音波センサおよび赤外線レーザセンサにより、人や障害物を検知すると、自動走行を停止します。
③カメラ
前方・後方・側方の作業、視界をタブレットのアプリケーション(パイロットアイ+)で確認できます。
④3色灯
3色のLEDにより離れた所から、本機の状態を確認できます。
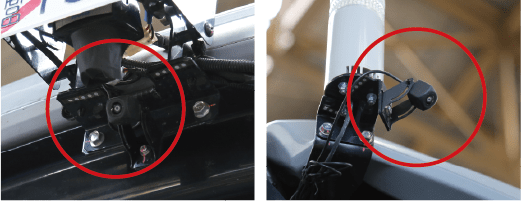
⑤遠隔監視装置用Wi-Fiアンテナ
遠隔監視装置(パイロットアイ+)の情報を送受信するWi-Fiアンテナです。
⑥IMU+RTK-GNSSアンテナ
IMU(慣性計測装置)を内蔵したRTK-GNSSアンテナです。

⑦モータ内蔵ステアリング
ステアリングモータによる自動操舵を行います。

⑧モードスイッチ
自動走行、自動操舵の「入・切」を行えます。
タブレット
走行経路設定(パイロットアイ)
作業登録・走行パターン、経路設定などが行えます。

遠隔監視装置(パイロットアイ+)
本機カメラの映像やエンジン回転数など、本機状態を確認できます。

リモコン
オペレータが遠隔で、自動走行の開始、一時停止、停止ができます。また、ロボットモードによる作業終了後、トラクタの前後進とステアリング操作を行えます。

RTK-GNSS基地局(オプション)
RTK測位によるGNSSの補正情報を本機のIMU+RTK-GNSSアンテナに送信し、高精度作業を実現します。カバー範囲は半径約2kmです。

充実機能
- 開始点誘導
ボタン1つで成形したほ場の作業開始点まで自動で移動します。 - リモコン移動(有人監視型R3)
リモコン操作でトラクタをあぜ際等まで移動することが可能です。
※ロボットモードによる作業終了後のみ。 - ほ場登録
一度、ほ場・作業機等の登録をすることでそれ以降同じほ場・作業機を使用する際、再登録せず前回のほ場登録を呼び出すことで自動的に作業が行えます。 - 位置情報用高精度RTK-GNSSアンテナ(2周波対応)
受診周波数を2周波にすることでより高精度な位置情報を取得できます。 - 傾斜補正用IMUセンサを内蔵
アンテナ内にIMUを搭載することで機体が傾いても正しい位置の補正を行います。 - RTK外部補正データ:VRS(Ntrip)対応
基地局なしで携帯電話等のインターネット回線を通じて位置補正データを受信するシステムになります。
安心機能
- 安全センサ(有人監査型R3)
トラクタの周囲に安全センサを設け、ロボットモード中に障害物を検知することで自動的に停止します。 - ほ場逸脱防止機能
自動走行中のトラクタがほ場を逸脱する可能性があると判断した時は自動的に停止します。 - 傾き異常検出
自動走行中のトラクタがあぜや障害物に乗り上げ、前後左右に10度以上傾いた時には自動的に停止します。 - 緊急回避機構
自動走行中にステアリングを走行することで自動走行が「切」になります。 - 離席警報・停止機能
オートモード、自動操舵モード中に離席を検知すると、警報を鳴らします。そのまま検知を続けると自動的に停止します。
適応作業機
| 耕起・深耕・砕土 | 播種関係 | 施肥関係 | 除草関係 | |||||
| ロータリー | アッパーロータリー | スタブルカルチ | バーチカルハロー | 代掻きハロー | ロータリー装着型播種機 | ブロードキャスター | フレールモア | |
| ロボットモード | ○ | ○ | ○ | ○ | ○ | |||
| オートモード | ○ | ○ | ○ | ○ | ○ | ○ | ○ | |
| 自動操舵モード | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ○ |