効率性
ロボット単独作業で搭乗作業を78.9%削減
今まで人が行っていた作業をロボットに置き換えることで、ロボット単独での作業が増加、人の搭乗作業を削減することができます。全ての工程をトラクタに人が搭乗して作業する場合に比べ、外周作業(人が搭乗)+ロボット作業(無人)にすることで、人が搭乗して行う作業時間が約78.9%削減できます。(井関農機試算)


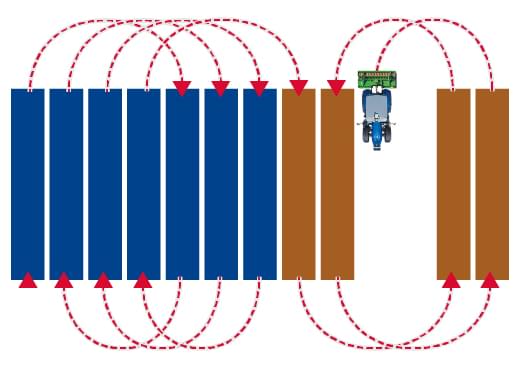
協調作業で作業時間を39.5%削減
ロボットトラクタの協調作業により大幅に作業効率がアップします。広大なほ場の作業をロボット(無人)+標準的なトラクタ(監視用・有人搭乗)の2台で協調して作業を行うと、1人が2枚分の作業を1台のトラクタで行うことに比べ、作業時間が約39.5%削減できます(井関農機試算)。つまり、同じ時間での作業面積が約1.4倍に拡大します。また、1台が整地し(無人ロボット)、もう1台が播種(有人搭乗)のように異なる作業を2台で連携して効率的に作業することができます。

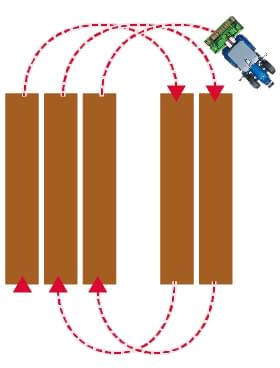
インフィル旋回で効率化
インフィル旋回とは、ブロック単位でスキップ旋回を行う方法です。2列スキップや、3列スキップなどのほ場に優しい旋回が可能です。スキップ旋回での作業が1ブロック毎にできるので、大区画ほ場で、作業の異なる協調作業を行う場合でも効率的です。※
※:ほ場の外周や、条件によりロボット作業を行わない経路は有人での作業が必要です。


ほ場に優しい旋回
ブロック単位でスキップ旋回

協調作業で2台目のトラクタもマップデータを共用することで、自動直進をしながら監視できます。
幅広い適応性
曲線の経路も作業可能
直線の作業だけでなく、曲線の経路も作業可能。外形形状や傾斜の関係から、昔から曲線状に作物を植えているほ場でも、経路を直線に変更しなくてもロボットモードで作業ができます。


広い自動運転の速度範囲
無人での自動運転の速度が0.1~10.0km/hで可能ですので、超低速から中速作業まできめ細かく対応できます。

適期作業にも対応
天候、季節に迫られる作業も、協調作業で効率的に行えます。自動操舵の有人搭乗トラクタで協調作業を行うと更に効率的です。

使いやすさ
Home機能
Home位置誘導で自動走行終了時、指定したHome位置まで自動で走行させることができます。
